

IT之家 3 月 29 日消息,特斯拉官方账号今日在 X 上回复网友时,就其 FSD 辅助驾驶系统一项核心能力作出了说明,引发外界关注。
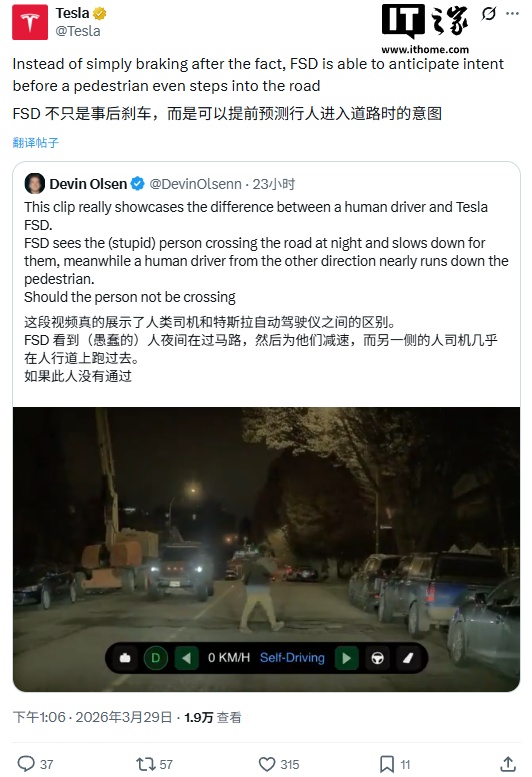
在一段对比人类驾驶员与 FSD 应对夜间横穿马路行人的视频下方,特斯拉官方账号回复称:FSD 并非在事后才进行制动,而是能够在行人踏入道路之前就预判其意图。
这也是特斯拉在自动驾驶技术路径上的一个关键演进方向 —— 从对外部环境的“被动反应”向对交通参与者行为的“主动预判”转变。这一能力的实现,得益于特斯拉 FSD 系统近期的底层架构升级。
技术资料显示,特斯拉 FSD 从 V12 版本开始就引入了“端到端”神经网络架构,改变了以往依赖预设规则的传统模块化设计。在此基础上,后续的 V13 及 V14 版本进一步加入了基于 Transformer 架构的时序处理能力。
具体而言,车辆不再单纯依赖摄像头看到的画面进行处理,而是构建了一个长达 15 秒左右的“时间缓冲区”。FSD 能够“记住”过去十几秒内每一个动态物体的运动轨迹,即使行人或骑行者短暂地被路边停靠的车辆或障碍物遮挡,AI 也能依据其消失前的速度和方向,推算其当前位置及可能的意图,有着类似人类驾驶员的“预判”能力,尽可能规避事故的发生。

2026 年 2 月,特斯拉欧洲官号发布了一段在荷兰进行的实测视频,展示了搭载 FSD V14.2.1 版本的车辆在真实路况下对交警手势的精准识别。
在视频中,尽管路口交通信号灯显示为红色,但当现场交警以标准手势指挥车辆通行时,测试车辆并未受到红灯约束,而是自主完成了通行动作,过程平稳连贯,无迟滞或误判。这一功能的核心在于,FSD 的神经网络不仅通过占用网络(Occupancy Network)将三维世界细化为高精度的立体像素来感知环境,还升级了“骨骼追踪”模型,能够实时捕捉人体上多达 18 个关节点动作,从而区分一个行人是站在路边看手机,还是主动发出“停止”或“通行”的手势指令。这意味着系统开始理解交通中非结构化的“社交信号”,而非仅仅执行硬性的交通法规。
从技术实现层面看,这同样意味着特斯拉 FSD 的决策逻辑正在发生质变。在传统的规则驱动模式下,车辆需要将“感知”到的物体进行分类,再通过预设的“规划”逻辑去执行“控制”指令,模块间的信息传递存在损耗。而在新的端到端架构下,AI 可通过观看海量的人类驾驶视频进行“自学”,直接由图像输入生成驾驶控制指令。特斯拉工程师此前曾总结,采用端到端算法的原因在于人类驾驶中的价值观极为复杂、现实世界细节过于丰富且反应要求极快,传统规则化编码难以覆盖所有“长尾场景”。
值得注意的是,尽管特斯拉 FSD 在技术层面展示了从“事后制动”向“事先预判”的跨越,但它在实际应用中仍面临现实挑战。
监管层面,美国国家公路交通安全管理局近期已升级对约 320 万辆特斯拉车辆的调查,重点关注系统在能见度不佳等恶劣环境下的可靠性。而在中国市场,由于数据采集与训练的本地化限制,部分用户反馈 FSD 在面对诸如外卖骑手穿行、复杂混合车道等本土化场景时,仍会出现水土不服的现象。这显示出,从“能够预判”到“在所有复杂场景下均能准确预判”,自动驾驶技术仍有较长的验证与迭代之路。
