


一只“手”,凭什么让中国最顶级的智能制造巨头集体上头?
作者 | 李水青
编辑 | 漠影
想象这样一个场景:
你站在一家顶级汽车工厂的总装车间里。流水线上,机器人挥舞机械臂高速完成焊接、搬运、喷涂等工序。一切看起来都很“智能”。
然后,到了最后一道工序——把一根细小的线束插进一个巴掌大的连接器里。线束是软的,连接器的卡扣需要2牛顿的力,角度偏一度就插不进去。
机器人停了。整条产线,卡住了。
一个工人走过来,用两根手指轻轻一推,“咔嗒”一声,三秒解决问题。
这是当下具身智能行业面临的一个尴尬事实——机器人能跑、能跳、能翻跟头,但干不了这种精细活。
过去两年,资本疯狂涌入“机器人大脑”,估值一个比一个高。但真把机器人扔进工厂,绝大多数只能在已经自动化了80%的岗位上打酱油——搬箱子、扫扫地。而汽车总装、精密装配、柔性分拣这些关键的最后20%核心岗位,至今是机器人难以抵达的地带。
主要原因在于,这些活需要一双像人手一样灵活、敏感、有劲的手。但灵巧手行业长期深陷“成本高、不稳定、不可靠”的泥潭,谁也算不清回本的账。

▲灵巧手被称为具身智能进工厂进家的“最后一厘米”
就在这个困局中,一家成立仅1年半的杭州公司,却让宁德时代、京东、小米、理想汽车四家横跨新能源、物流、消费电子、汽车制造的巨头,在极短时间内完成了“集邮式”押注。
这家公司叫曦诺未来Xynova,创始人是一位95后学霸。他掏出的“杀手锏”,是一只叫做Flex 2的灵巧手——全球首款“腱绳+直驱”混合驱动的量产灵巧手。
6月1日-6月5日,曦诺未来Xynova Flex 2首次亮相奥地利全球机器人与自动化盛会ICRA 2026,以像人手一样灵巧敏捷的动态操作引起了大量海外参展者关注,并现场演示“执笔画画”、“双手协作铲爆米花”等一系列精细操作。
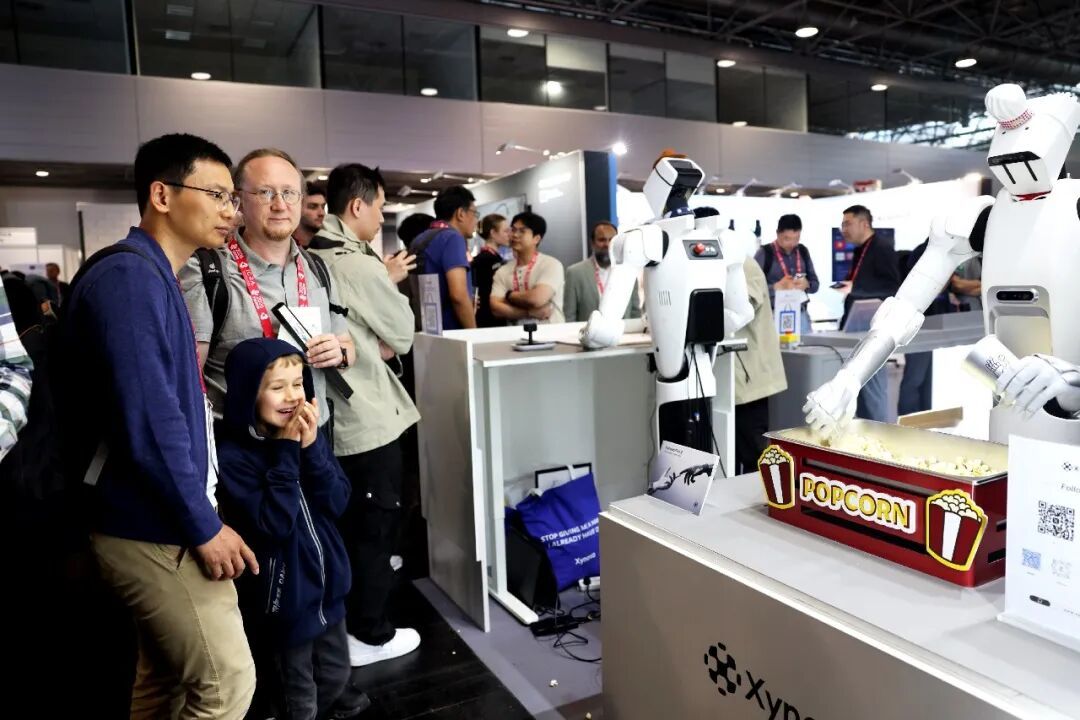
▲曦诺未来Xynova Flex2在ICRA上亮相引关注
半年三轮融资,累计金额逼近10亿元人民币。就在上周,其最新完成的数亿元A轮融资,由理想战投、中信建投资本和中信建投投资联合领投,老股东小米战投、财通资本等持续超额加码。
这不禁让人想问:一只“手”,凭什么让中国最顶级的智能制造巨头集体上头?

▲曦诺未来Xynova Flex2在ICRA的现场演示(原速播放)
01.
宁德、京东、小米、理想组局:
一张罕见的“产业全明星”股东表
我们先来拆解一下曦诺未来Xynova的融资履历,这几乎是一张中国智能制造的“藏宝图”。
天使轮(2025.12),超1亿元:宁德时代旗下溥泉资本领投,小米战投、正轩资本、东方嘉富、电科基金等跟投。
宁德时代的电池工厂里,有大量精密操作需求。电池模组的抓取、堆叠、检测,这些环节对末端执行器的精度和可靠性要求极高。而宁德时代选择在这个时候、以领投方的身份进场,释放了一个明确信号:他们需要一双“手”,而且他们看好曦诺未来能做出这双手。

▲曦诺未来Xynova Flex2在ICRA的现场演示动图(原速播放)
Pre-A轮(2026.3),数亿元:京东领投,财通资本、毅达资本、浙大友创、三七互娱、杭州数据集团等跟投,老股东小米战投等追加。
京东的亚洲一号智能仓,是全世界最繁忙的物流中枢之一。海量SKU、不规则物体、高频次拣选……夹爪能处理的标准化商品只是冰山一角,大量柔性、易碎、异形的商品至今依赖人工分拣,这正是灵巧手的主战场。
A轮(2026.5),累积近十亿元:理想战投、中信建投资本和中信建投投资联合领投,小米战投等老股东继续加码。
理想汽车代表了汽车智能制造产线的真实入口。总装车间里那些至今无法自动化的线束插接、卡扣装配、内饰件安装,正是灵巧手必须攻克的“最后20%”堡垒。理想汽车战投方在投资公告中明确表示:“期待未来双方围绕产品验证、场景需求和产业链协同,共同推动具身智能从‘能移动、能识别’走向‘能稳定操作、能真正干活’。”
而贯穿三轮、持续加码的小米战投,则横跨了汽车智能制造与广阔的C端消费电子生态。小米战略投资部此前曾表示:“灵巧手是机器人灵巧操作末端的重要执行器,曦诺未来拥有多年电机积累,自研自制核心部件,方案表现优秀。”

▲曦诺未来Xynova Flex2在ICRA的现场演示动图(原速播放)
如果把这四家股东的业务版图拼在一起,你会发现一幅惊人的图景:
宁德时代:新能源制造,电池模组精密操作
理想汽车:汽车智能制造,总装线复杂装配
京东:智慧物流,柔性分拣与仓储操作
小米:消费电子生态+智能制造
这四家公司,几乎覆盖了中国智能制造业从能源到终端、从生产到流通的完整链条。而他们共同押注的,是同一个底层技术——一双能让机器人在真实物理世界中完成精细操作的“灵巧手”。
更值得玩味的是,这个逻辑与特斯拉不谋而合。马斯克之所以坚持自研执行器、自研灵巧手,主要是因为末端执行器是人形机器人从“能移动”到“能干活”的关键卡口。谁掌握了这个“接口”,谁就掌握了具身智能生态的入口。
可以预测,一个覆盖“新能源制造→汽车总装→智慧物流→消费电子”的具身智能操作闭环生态,正在悄然成型。曦诺未来Xynova在卡位的,正是为中国最顶级的制造业巨头们定制这个物理世界的“通用接口”。

▲曦诺未来Xynova Flex2在ICRA上亮相并展示精细操作技能
02.
攻克“最后20%”产业死穴:
让大厂集体抢投的技术底牌
产业对灵巧手的渴望是真的,但过去灵巧手交出的答卷也是真的让人摇头。
从技术角度来看,灵巧手行业长期被一个“不可能三角”卡死:高成本、可靠性不足、性能不满足生产需求,三者像三座大山,压得大多本体厂商望而却步。而痛点,也正是曦诺未来Xynova的突破口。
我们首先来看下市面上既有技术路线,主要是在三条路上来回摇摆:
第一条路:连杆驱动。结构刚性强、传动精度高,是工业夹爪的“老大哥”。缺点是手指粗、自由度少,磕碰相对不易坏,但重载卡死易损。它更像“钳子”,而非“手”,缺少柔顺性,大多只能刚性夹持,难做精细柔性作业。
第二条路:纯腱绳驱动。 这一路线模仿人体肌腱原理,用绳索传递动力。优点是柔顺、轻量、安全,碰撞时能像人的肌腱一样吸收冲击。但缺点也很明显,绳索会蠕变、会磨损,长期运行的持续可靠性不足。你让它去插一个精度0.1毫米的连接器,它可能今天插得进去,明天就插不进去了。
第三条路:纯电机直驱。在每个关节里塞一个微型电机,响应快、精度高。但代价是手部末端变得极其笨重,发热严重,不耐冲击。一旦碰撞,电机和减速器很容易损坏。还有一个棘手的“自锁”问题,断电或失控时手指无法锁紧,被抓物会直接脱落,这在工业场景中是致命隐患。
行业在“柔但不准”和“准但不柔”之间左右为难,连杆则困在“刚性有余、灵巧不足”的尴尬里,谁也没能同时解决。
曦诺未来Xynova Flex 2——全球首款明确采用“腱绳+直驱”混合驱动方案的量产灵巧手,为第四条路提供了注脚。
